惯性导航和组合导航【惯性导航和组合导航的优缺点分别是什么?】
惯性导航和组合导航是现代导航领域中两种重要的技术,它们各自具有独特的优势和局限性。将详细探讨惯性导航和组合导航的优缺点,帮助读者更好地了解这两种技术。
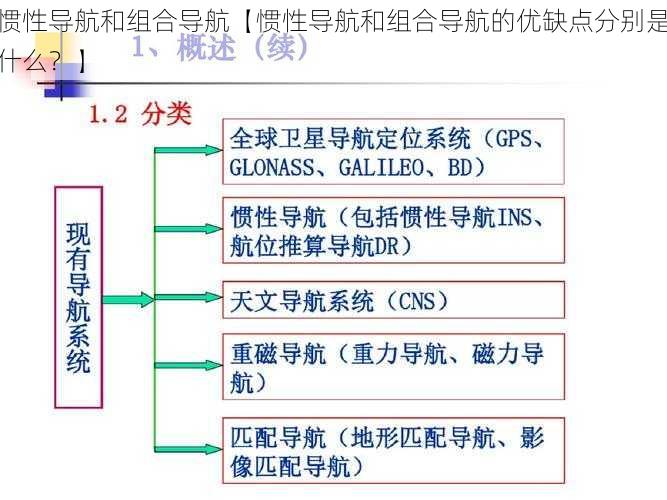
导航技术在现代社会中扮演着至关重要的角色,无论是在航空航天、航海、汽车还是军事领域,都需要准确可靠的导航系统来确保安全和高效的运行。惯性导航和组合导航作为两种主要的导航技术,各自具有独特的特点和应用场景。了解它们的优缺点对于选择合适的导航系统以及在特定应用中优化性能至关重要。
惯性导航的优点
1. 自主性:惯性导航系统完全自主工作,不需要外部信号的支持,因此在无法接收卫星信号或其他导航信号的环境中仍然能够工作。
2. 高精度:惯性导航系统利用陀螺仪和加速度计等传感器测量载体的运动状态,具有较高的测量精度。
3. 长时间稳定性:惯性导航系统不受外界环境的影响,具有长期稳定性和可靠性。
4. 小型化和轻量化:惯性导航系统的传感器和计算机等组件可以做得非常小巧轻便,适用于各种空间和重量受限的应用。
惯性导航的缺点
1. 累积误差:由于惯性导航系统的测量值是基于传感器的累积,因此随着时间的推移,误差会逐渐累积。为了减少误差,需要定期进行校准和更新。
2. 对载体运动状态的依赖:惯性导航系统的精度和性能受到载体运动状态的影响,例如加速度、角速度和姿态等。在高速、大加速度或复杂运动环境下,误差会增加。
3. 初始对准困难:在使用惯性导航系统之前,需要进行初始对准,以确定载体的初始位置、速度和姿态。初始对准的准确性和速度会影响整个导航系统的性能。
4. 成本较高:惯性导航系统的传感器和计算机等组件较为复杂和昂贵,因此成本较高。
组合导航的优点
1. 精度互补:组合导航系统将惯性导航系统与其他导航系统(如卫星导航、无线电导航等)相结合,利用多种导航信号的优势进行互补,提高导航精度。
2. 实时校正:其他导航系统可以实时校正惯性导航系统的误差,从而提高系统的精度和稳定性。
3. 改善初始对准:其他导航系统可以提供初始对准所需的信息,简化惯性导航系统的初始对准过程。
4. 提高可靠性:组合导航系统可以增加导航系统的可靠性,当其中一种导航系统出现故障时,其他系统可以继续提供导航信息。
组合导航的缺点
1. 复杂性增加:组合导航系统需要将多个导航系统进行集成和融合,增加了系统的复杂性和成本。
2. 信号干扰:不同导航系统的信号可能会受到干扰,从而影响导航精度。
3. 系统更新和维护:组合导航系统需要及时更新和维护各个导航系统的数据库和算法,以确保系统的性能和精度。
4. 对环境的适应性:组合导航系统对环境的适应性可能不如惯性导航系统,例如在恶劣的电磁环境或高动态环境下,性能可能会受到影响。
惯性导航和组合导航各有优缺点,在不同的应用场景中具有各自的优势。惯性导航适用于对精度要求较高、环境较为简单的应用,如航空航天、军事等领域。组合导航则适用于对精度和可靠性要求较高、环境较为复杂的应用,如航海、汽车等领域。在实际应用中,通常会采用多种导航技术相结合的方式,以充分发挥各种技术的优势,提高导航系统的性能和可靠性。
随着技术的不断发展,惯性导航和组合导航的性能也在不断提高和改进。未来,随着人工智能、大数据和先进传感器等技术的应用,导航系统将变得更加智能、精确和可靠,为人们的生活和工作带来更大的便利和安全。
以上就是关于惯性导航和组合导航的优缺点分析,希望对大家有所帮助。如果你还有其他问题或需要进一步的信息,请随时向我提问。